
I'm working on a dynamically driven parametric surface for our installation at the Whitney.
Catenary Topology
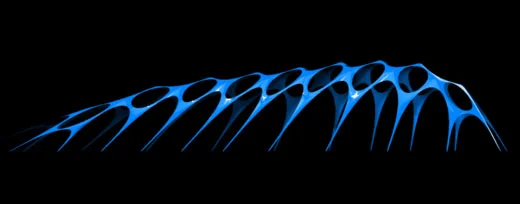
Catenary Topology With Applied Vertical Force
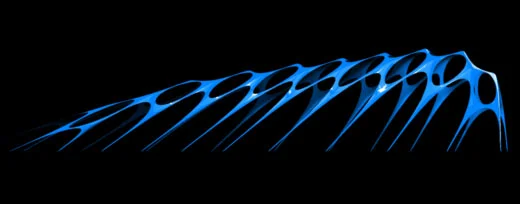
Catenary Topology With Applied Angle Force
Taking my previous studies of a self optimizing topology as a starting point, I’m testing the effects of applied forces to create dynamic catenary arches. In this example the base topology is being drawn to a point of influence at approximately 15 deg above the surface. The surface doesn’t fully optimize its topology due to the localized forces acting along the ridgeline — something I need to resolve in the next iteration.
Surface Optimization Animation
This quick animation shows the self optimizing surface I’ve been working on. The clip shows local surface geometry automatically adjusting into the most efficient positions based upon the geometry of the edge control points.
Dynamic Mesh Optimization
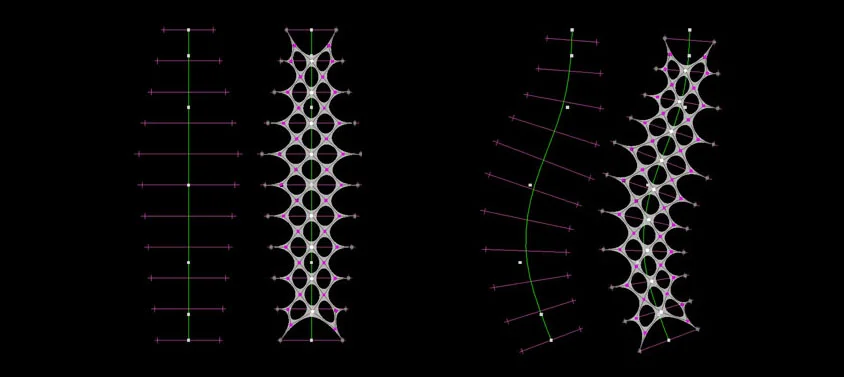
This study is something that takes up a number of issues that I’ve been interested in for some time: kinematic armatures, stockings, perforated meshes, and dynamic organization. The goal here is to develop a surface that optimizes its topology to any given form. The diagram above shows a lattice that controls the endpoints of the perforated surface and the resultant surface when these endpoints change position. It is very subtle in the two stages, but the perforations dynamically adjust their shape and position proportionally in respect to assumed material properties in the surface. This is a pretty simple example but the implications of this kind of optimized surface are really profound in my opinion. Not only does this approach solve the seemingly inherent “stopping problem” in dynamically driven architecture, but it provides a new kind of optimized geometry within a given formal organization.
Parametric Actuator Light Fixture
Here is a quick pass at an idea I had for a parametric, actuator controlled light fixture that would recess or protrude based on dynamic inputs.