
I designed these display pieces with David Boira using a kinematic machinery that I built in Maya. They are going to be used for the GSAPP final show as display surfaces for the work built in our studio this semester. They were CNC milled out of high density foam at Sci-Arc in Los Angeles by our new friend Bryan Flaig.

The Terminal

This is the final image of my presentation in Hernan Diaz Alonso's final review.
Between Form and Ornament

The goal of my research this semester has been to produce an architectural system that situates itself somewhere in the blurry space between structure, surface, form and ornament — hopefully that is beginning to come across in the work.
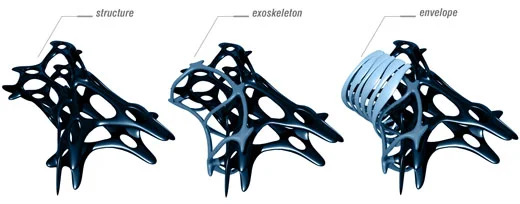
Enclosure Strategy

I’m working with three components to develop a megastructure, exoskeleton, and cladding system for my studio project. They have a top down parametric relationship to each other based on the operation of the kinematic armatures that drive the form.
Topological Branching

One of the issues driving my work this semester is a frustration with the inadequacy of surfaces and their inherent thinness. I’m trying to find a way to make enclosure and space, not based on folded and curved planes, but with an idea of a thickened topology. I’m trying to develop something that can be inhabited, that has built in intelligence into how it organizes and structures itself, and whose operations open up new types of spatial and ornamental effects. The dense branching of the complex topology above is produced by the kinematic organization of multiple arrays of individual components and a subsequent phase shift of their topological order into one mega surface.
Subdivision Surfaces
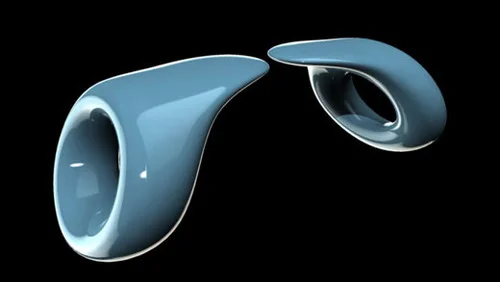
An example of two subdivision components
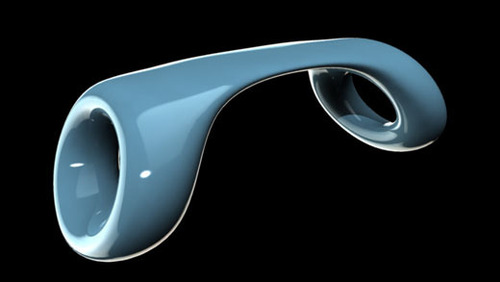
An example of subdivision surface attachment
Subdivision surfaces were recently included in the new release of Maya and I've been experimenting with them quite a bit. I've figured out that they offer a way to make seamless connections between topologically distinct pieces ( I assume this is probably not much of a secret in the animation world). This is pretty significant as it solves a lot of problems fundamental to nurbs modeling (while it raises many new ones).
Kinematic Curvature

While I was working for Peter Eisenman last summer, he freaked out on me about a curve I drew poorly. The upside was that he sat down for half-an-hour to explain the properties of a good curve. It had much to do with a gradual increase in its degree of curvature, and a bit to do with something ineffable. Regardless, I’ve discovered a better way to make consistently elegant curves.
Playing around with inverse kinematics and dynamics in Maya, I figured out that you can produce curves with a kinematic armature that have gradual parametric curvature. This solves the inherent problem in splines and nurbs that there are no qualitative or performative restraints. I did some research into this and it is a concept that apparently already exists.
Kinematic curves are curves produced by machinery, or a combination of motions, as distinguished from mathematical curves. The appeal of this should be quite clear, we can produce precise machined curvatures that are free of the constraints of mathematically defined curves. I ‘m pretty sure I will be basing the rest of the semester on trying to maximize this potential in my project.